Bob Howe – A Brief Summary From 1960 to 2018
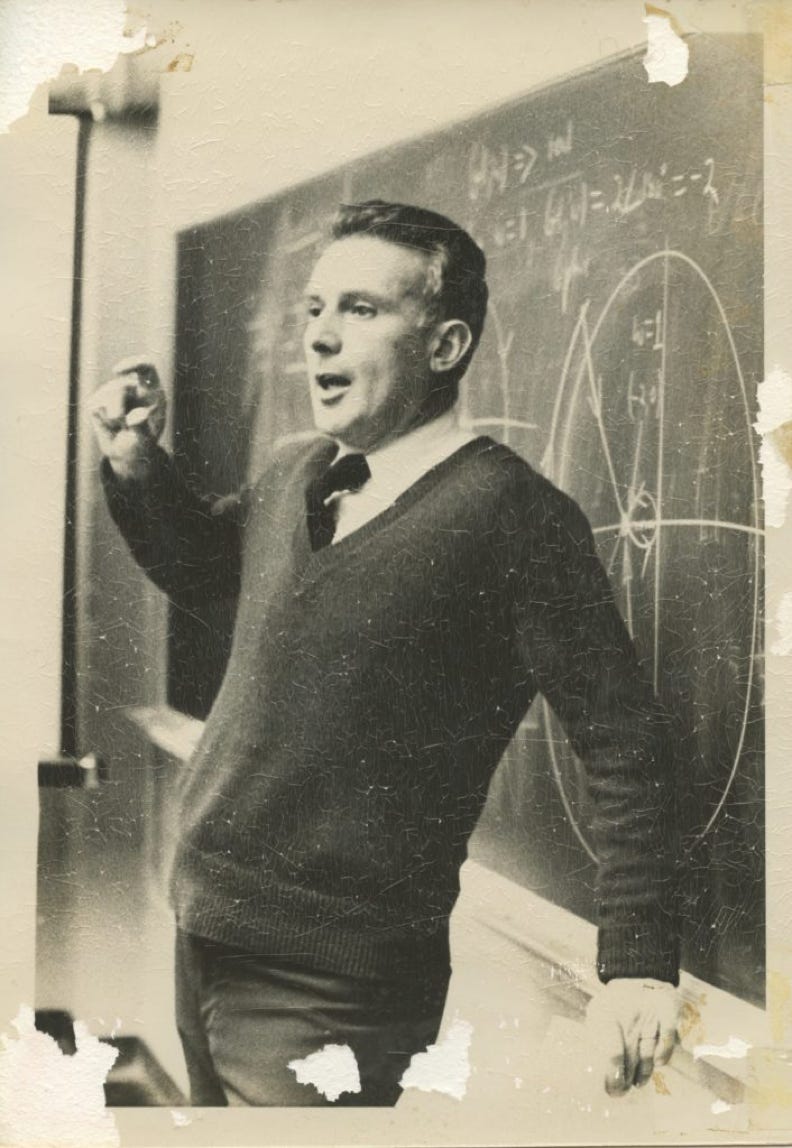
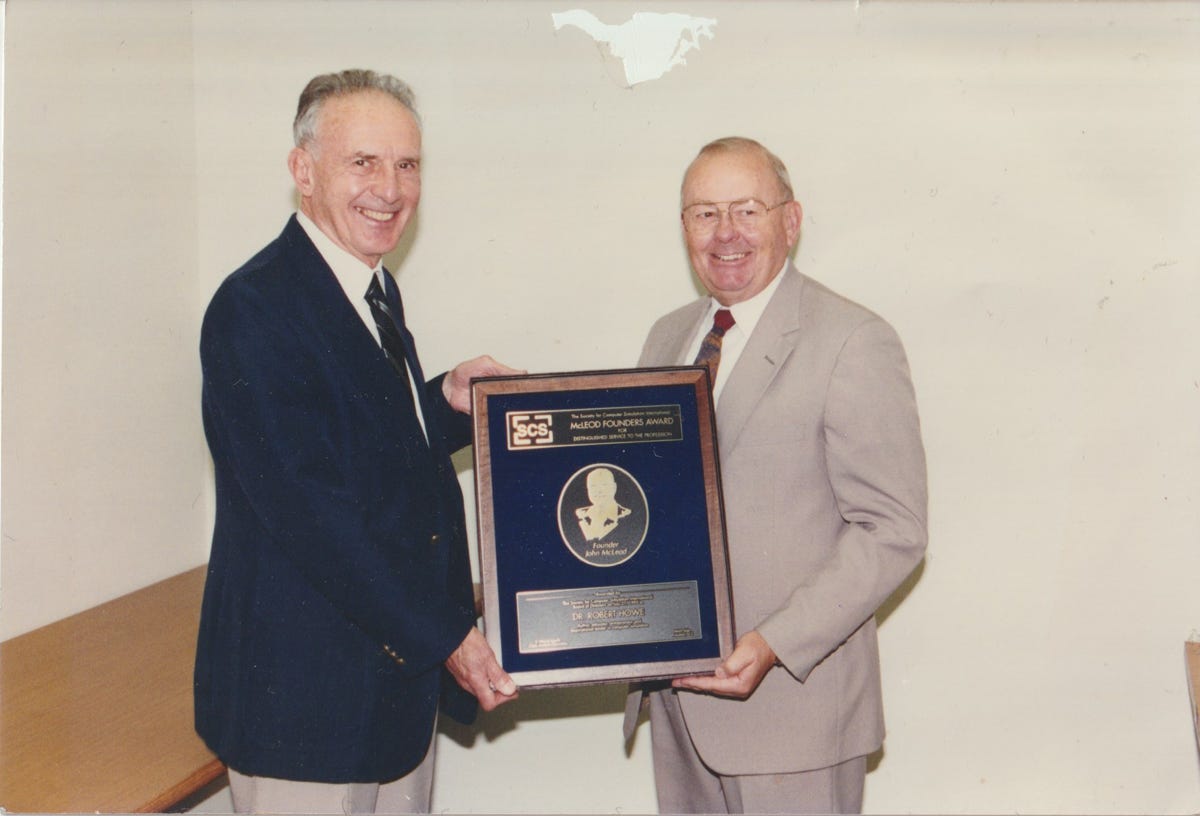
Bob Howe was Chairman of ADI’s Board of Directors from its founding to its sale to Reliance Electric Company in late 1969. Bob became a member of the Reliance Board, probably until the relationship with Reliance came to an end in early 1975. During this period, Bob also served on the US Air Force Scientific Advisory Board from 1971 – 1979. Bob’s first duty, of course, was to his employer, the U. of M. Bob was a highly respected member of the Aerospace Department faculty to the point that he served as Dept. Chair for 15 years during the 1970s and 1980s. Bob retired from the U. of M. in 1991 after he reached the age of 65. During his academic career, he published over 100 papers, and consulted for NASA and various companies. He was also active in several professional societies.
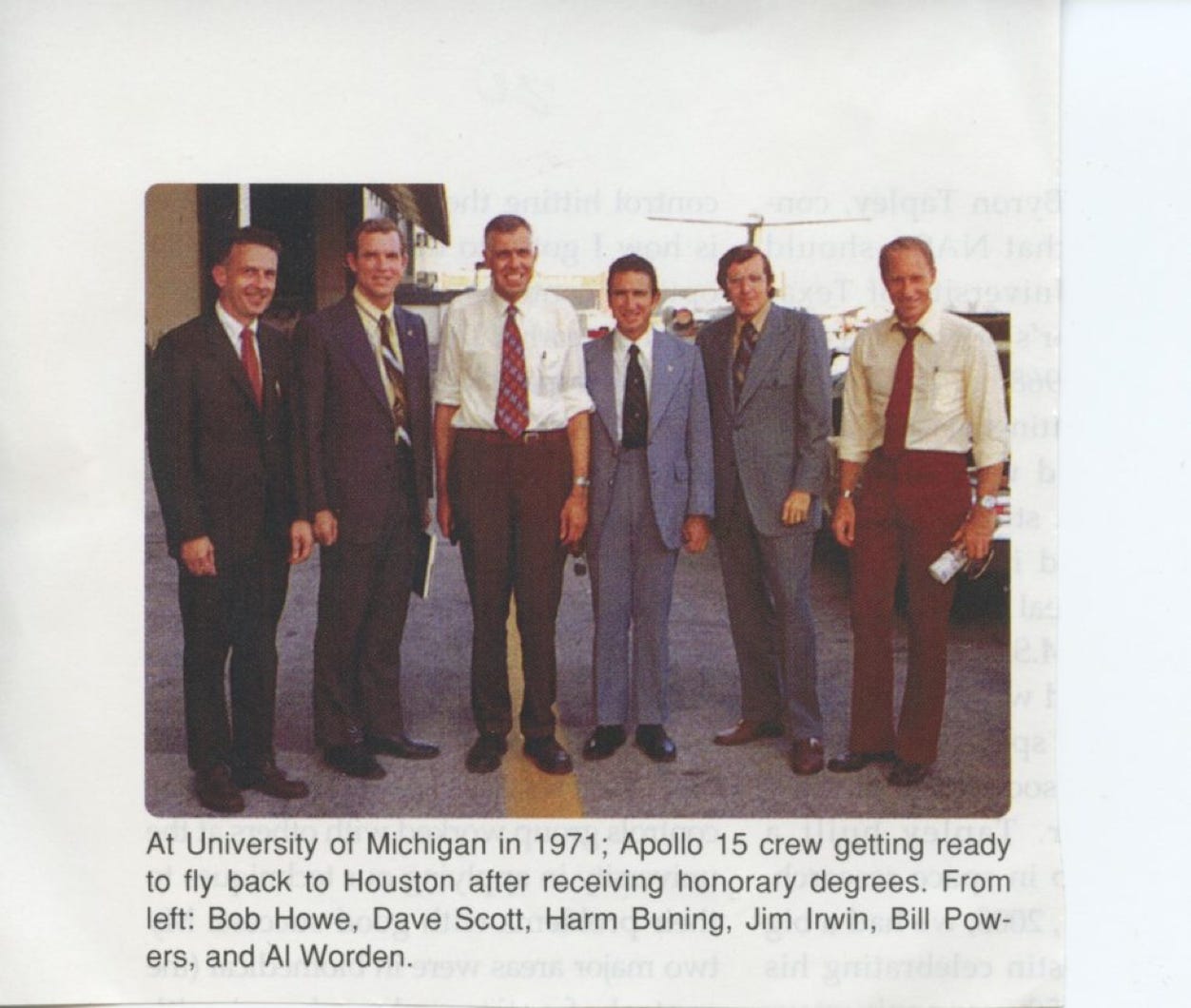
Bob Howe and U. of M. Aerospace Department colleague, Harm Buning, with the Apollo 15 crew.
Bob continued to be active with ADI over the years wherever he thought he could be of value. This involved both technical and sales areas. He particularly enjoyed visiting ADI customers in support of a sales effort.
In 1991, ADI’s owner, Internatio Muller, was attacked by a group of wealthy investors that was trying to take it over. IM eventually had to sell off a number of its holdings including ADI. IM assisted ADI in having a management buyout and taking ADI private. Bob participated in this buyout by becoming one of the stockholders in the new ADI. At that time, Bob and I became members of the five member Board of Directors of the new ADI. Bob regularly attended the quarterly Board meetings and the annual stockholders meeting and took an active part in these meetings. He had to retire from the Board in August 2017 because of his health. He attended the 2018 stockholders meeting on August 23 of this year just over a week before his death. He was always very interested in ADI from its founding in 1957 to the end of his life.
After I became an employee of ADI in September 1964, I had the pleasure of joining Bob in attending various Simulation Council and other conferences. Bob would often comment on papers presented and/or comments made by other attendees. Whenever one of these speakers or commenters presented a thought or comment that didn’t make sense, Bob would use this “teaching moment” to set matters straight. Once in a while he would end his brief, very logical presentation with the words “I rest my case!”.
Since these conferences were generally held in large hotels, we would stay in the hotel, have dinner there, and often join other attendees in one of the hotel bars after dinner. Occasionally the bar would have a piano. If the piano was unattended, Bob would not let the opportunity go to waste. He would sit at it and entertain those present with his boogie-woogie music at which he was quite good. Sometimes he would keep playing as long as he had an audience even if most of us had already headed off to bed.
In the 1970s and ‘80s, company sponsored user groups were in vogue. ADI established its ADI User Society or ADIUS around 1980 and it was active until the mid ‘90s. ADIUS always had an annual meeting and occasionally there were also some regional meetings. Bob always enjoyed attending these meetings and took an active part in making presentations. His attendance at these meetings highlighted the technical prowess of ADI. In addition to these activities in the U.S., Bob also attended numerous conferences in other countries, e.g., Japan, China, Israel, etc., going back to the 70s, at which he made presentations on behalf of ADI. These conferences led to candidates for the University’s “Visiting Scholars Program,” for which Bob and his wife did a lot of hosting. That program was another instance of cross-fertilization between the University and ADI!
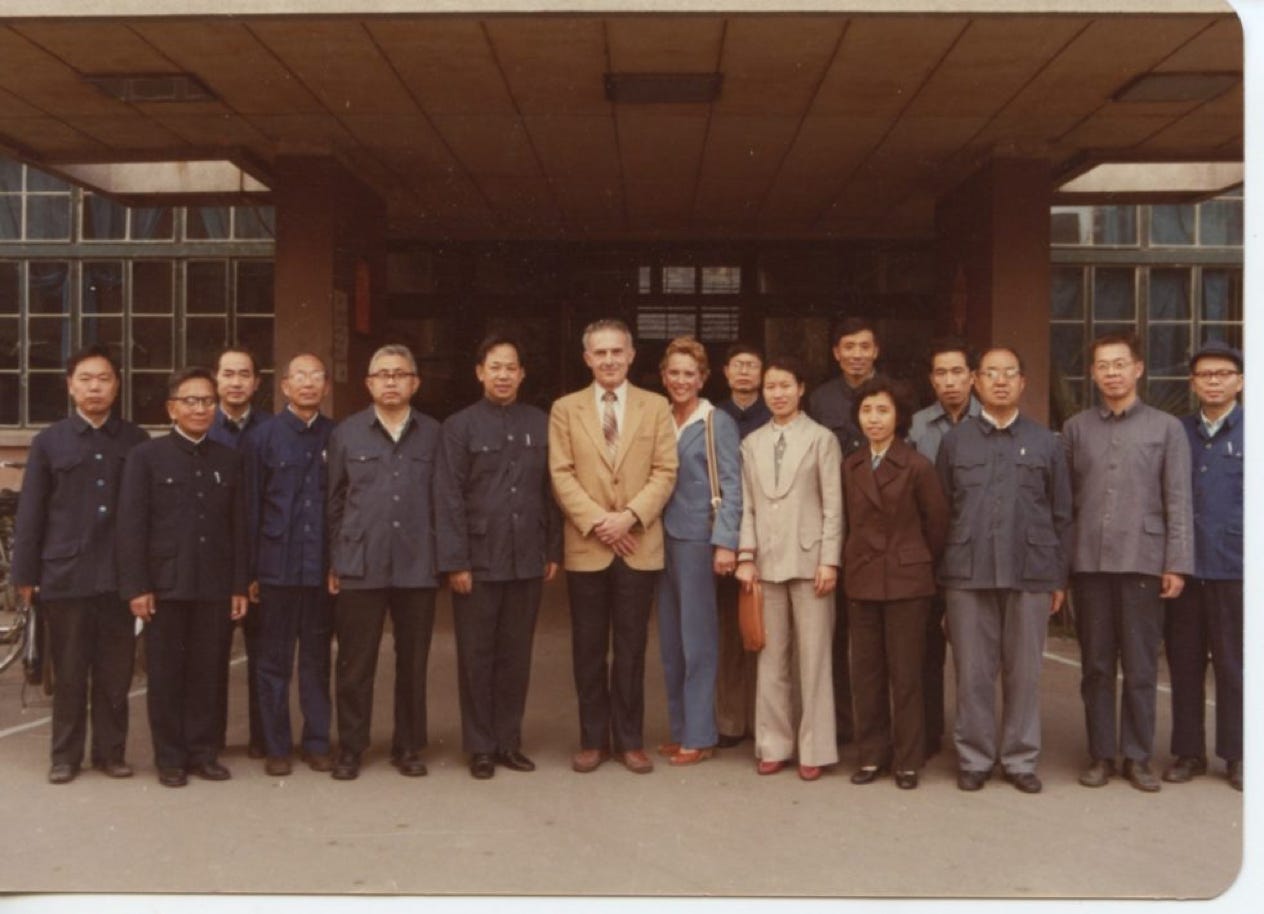
Bob Howe attending a conference in Asia
When he was in high school, Bob took up cross country running as a sport and continued this on a regular basis until he was no longer able to in his late 80s. Several years ago I made the mistake of asking Bob if he was still jogging. His quick retort was “I don’t jog – I RUN!”
Among things he really enjoyed over the years were going to Michigan football games and reading every edition of Aviation Weekly. He could probably quote statistics for every big commercial and every military aircraft ever built. Bob was also a collector. He collected postage stamps and Frank Sinatra records. Both of these collections were extensive and, in the case of the stamps, expensive. When Bob found an appliance that let him convert his vinyl Sinatra records to CDs, he bought it and converted all his records.
Bob and his family were avid mountain skiers. In 1982, Bob and his wife bought a condo in Vail, CO. They went to the condo several times each year. He finally gave up downhill skiing in his mid-80s. Bob never did anything part way – he was always very competitive until age and health took its toll.
Bob attended the ADI annual stockholders meeting on Aug. 23, 2018 and passed away on Aug. 31, just a few days after his 93rd birthday.
Material extracted from an obituary Bob prepared before his death is presented in Appendix G. Unfortunately, this document was not found among his many papers until months after his death. The family prepared the obituary that was published. Some of the material in Appendix G has been used in above sections of this document.
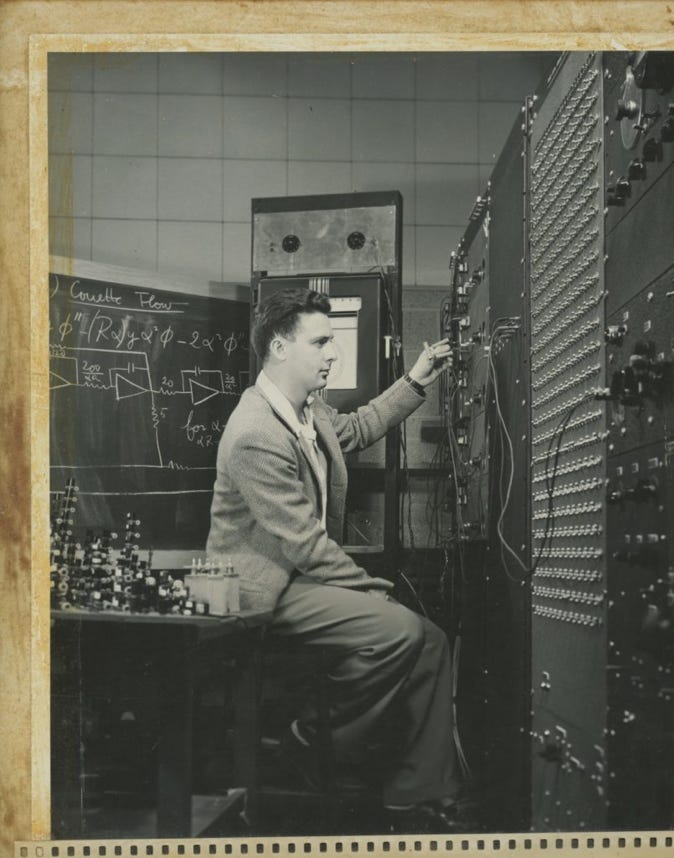
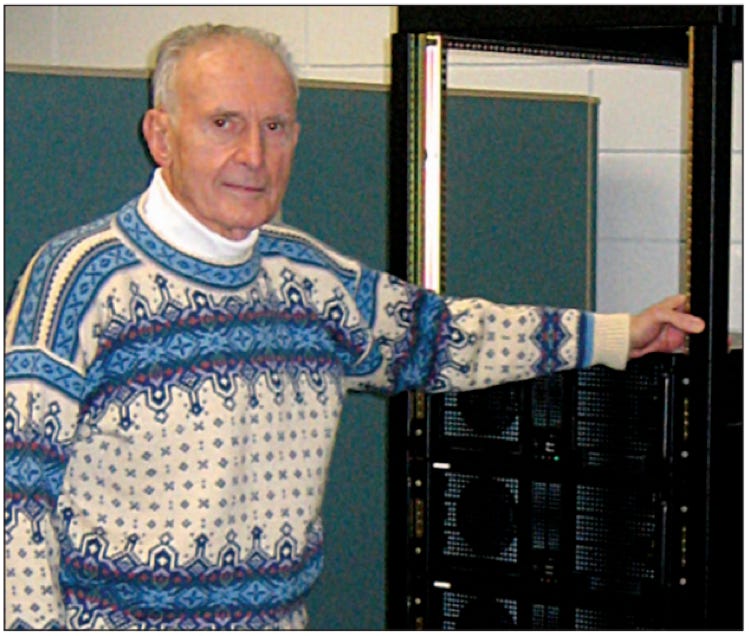
Bob Howe and a piece of ADI equipment in the 90s